
Aplicación para PC Volver
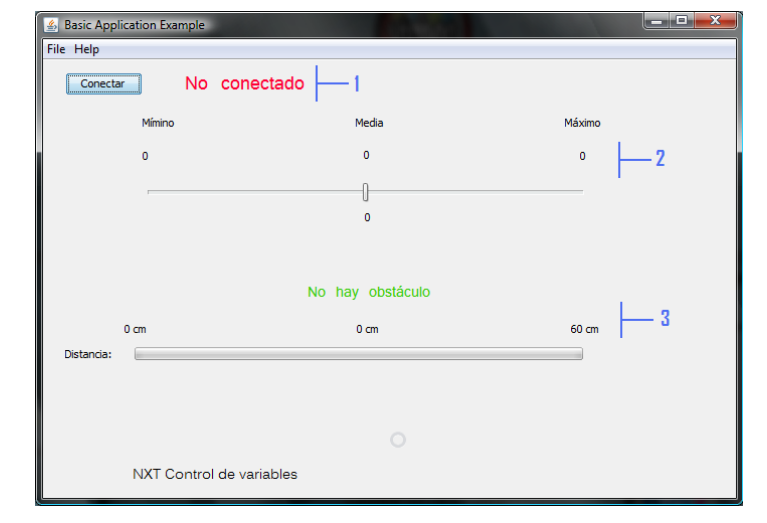
En este apartado se presenta el formulario que muestra los datos que entrega el robot durante su funcionamiento. El formulario se divide en tres partes: la dedicada a la comunicación, la dedicada al control del rango por el que se va a desplazar el robot y la dedicada al control de la presencia de obstáculos.
En la primera parte (indicada por el número uno en la figura) se tiene un botón, que será el que active el comienzo de la conexión NXT-PC, y además se dispone de un texto que, en caso de que exista una conexión entre el robot y el PC, advertirá de que la conexión ha sido realizada cambiando el mensaje por “conectado” en letras verdes.
En la segunda parte (la indicada por el número dos en la figura), una vez se establece la conexión, el robot envía los datos del calibrado, y seguidamente se muestran en pantalla. Estos datos vienen representados como máximo, mínimo y media.
La barra que hay a continuación y el texto inferior sirven para representar el valor detectado por el sensor de color. La barra lo representa gráficamente y el texto numéricamente, de esta manera se visualiza la corrección que debe realizar el robot en cada momento.
Además se añaden dos textos con las palabras “IZQUIERDA” y “DERECHA”, que indican hacia donde gira el NXT en cada momento.
En el tercer área (la señalada por el número 3 en la figura), se encuentra localizado todo lo relacionado con el sensor de ultrasonidos. Primero hay un texto que advierte de la presencia de un obstáculo, si el sensor detecta que éste está a menos de 20 cm. El texto cambia su mensaje por “Obstáculo encontrado” con letras rojas.
A continuación se sitúa una barra que representa gráficamente la distancia al objeto. Si dicha distancia es superior o igual a 60 cm, la barra permanecerá con su valor al máximo.
La pantalla que se muestra al usuario se corresponde con la de la siguiente figura.
En la primera parte (indicada por el número uno en la figura) se tiene un botón, que será el que active el comienzo de la conexión NXT-PC, y además se dispone de un texto que, en caso de que exista una conexión entre el robot y el PC, advertirá de que la conexión ha sido realizada cambiando el mensaje por “conectado” en letras verdes.
En la segunda parte (la indicada por el número dos en la figura), una vez se establece la conexión, el robot envía los datos del calibrado, y seguidamente se muestran en pantalla. Estos datos vienen representados como máximo, mínimo y media.
La barra que hay a continuación y el texto inferior sirven para representar el valor detectado por el sensor de color. La barra lo representa gráficamente y el texto numéricamente, de esta manera se visualiza la corrección que debe realizar el robot en cada momento.
Además se añaden dos textos con las palabras “IZQUIERDA” y “DERECHA”, que indican hacia donde gira el NXT en cada momento.
En el tercer área (la señalada por el número 3 en la figura), se encuentra localizado todo lo relacionado con el sensor de ultrasonidos. Primero hay un texto que advierte de la presencia de un obstáculo, si el sensor detecta que éste está a menos de 20 cm. El texto cambia su mensaje por “Obstáculo encontrado” con letras rojas.
A continuación se sitúa una barra que representa gráficamente la distancia al objeto. Si dicha distancia es superior o igual a 60 cm, la barra permanecerá con su valor al máximo.
La pantalla que se muestra al usuario se corresponde con la de la siguiente figura.
|
En el siguiente vídeo podrás ver como funciona la aplicación analizada en este apartado, mientras el robot recorre el circuito de pruebas .
|
|
